- Learn to add Movement action
- Get to know the action list
- Learn to add continuous model actions.
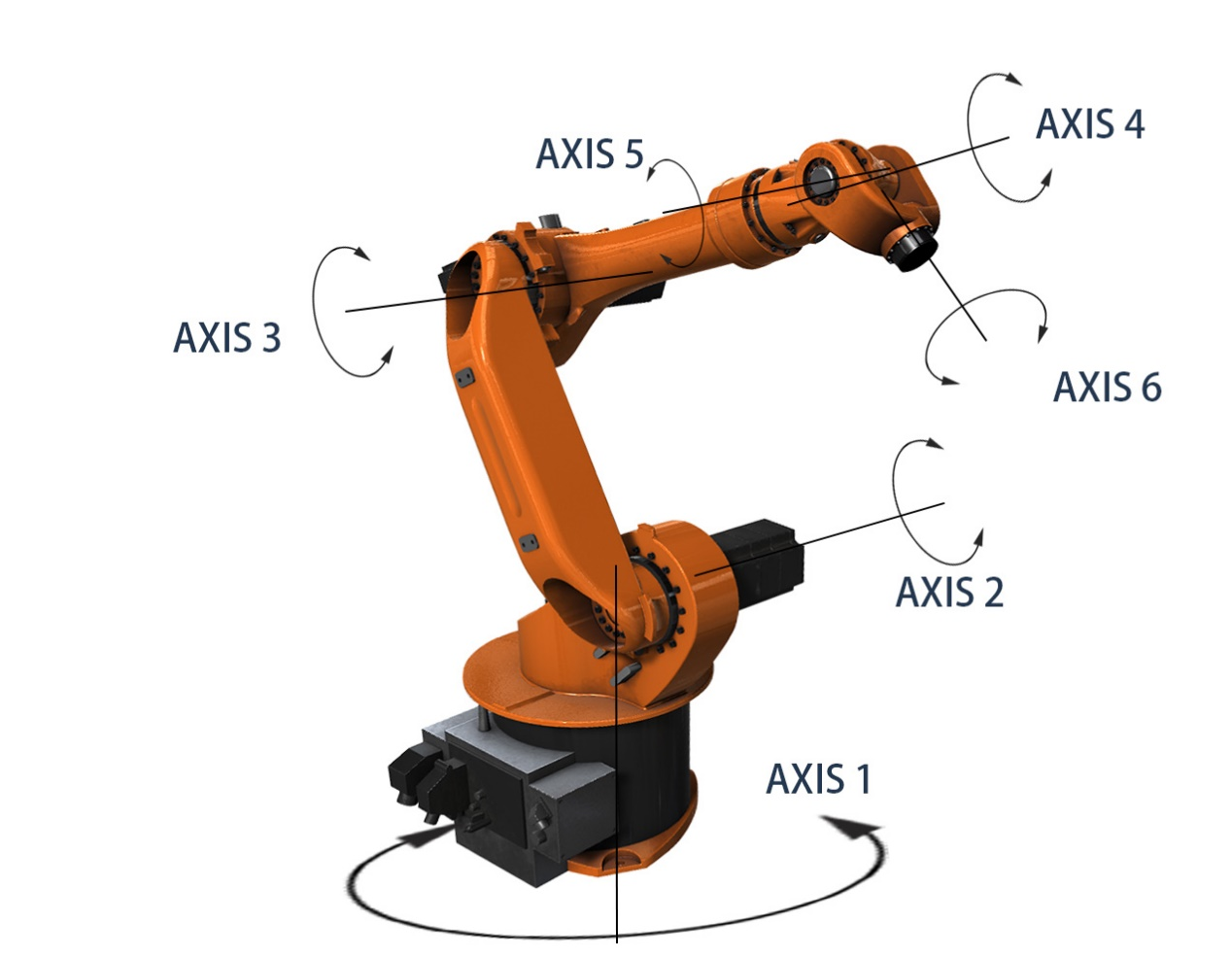
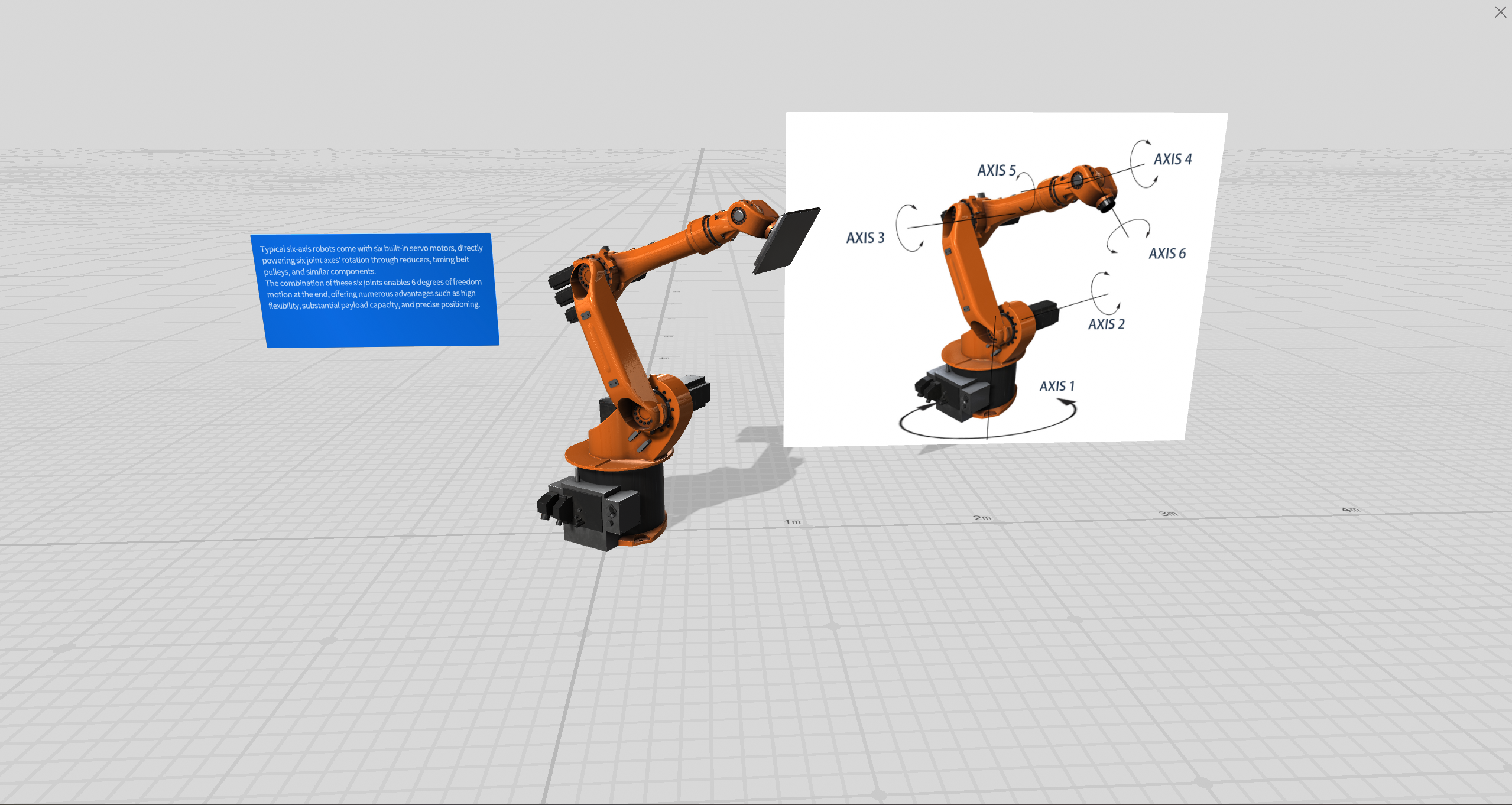
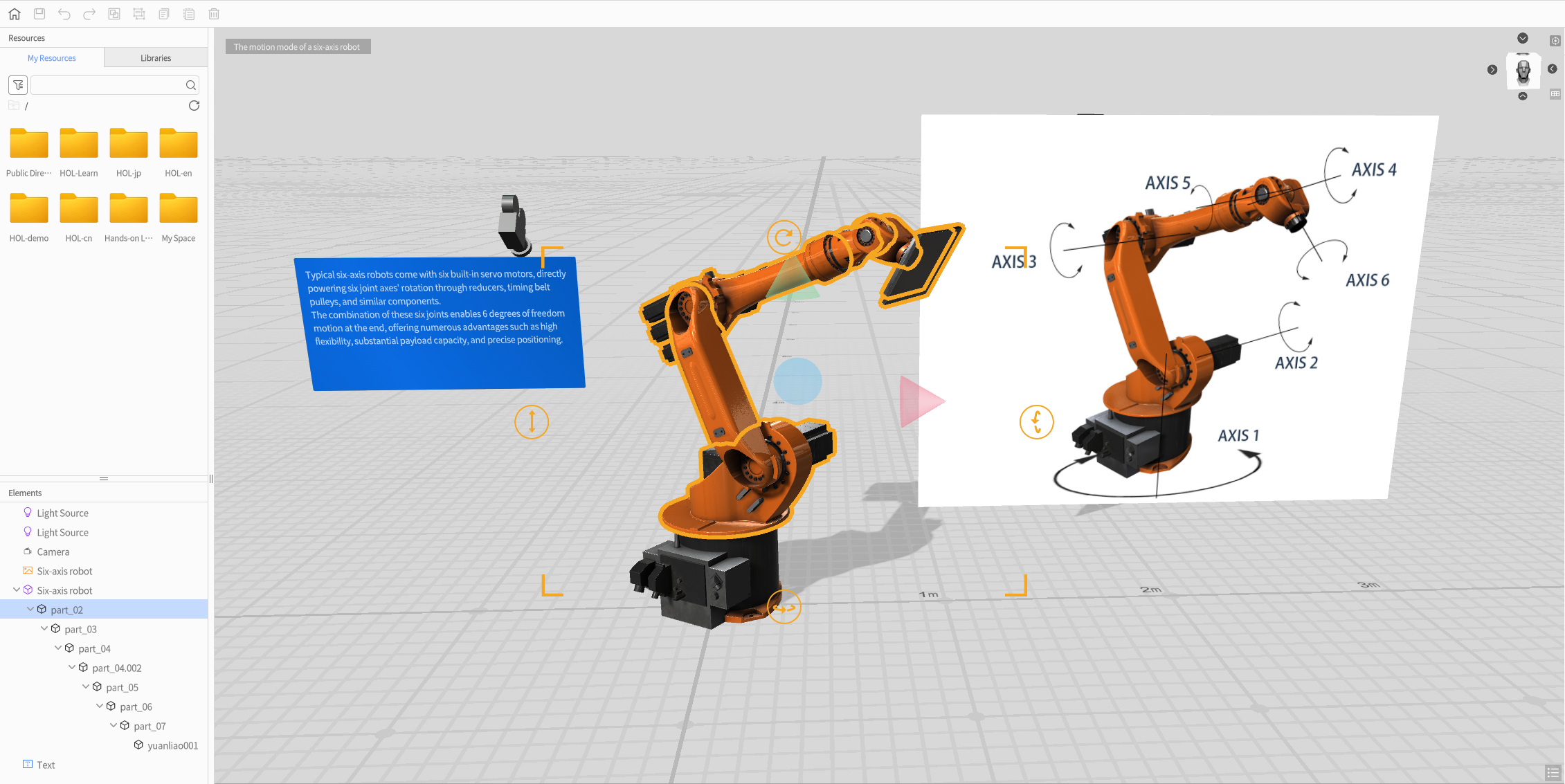
Upload the 3D model "6-Axis Articulated Robot.glb" and its corresponding image file downloaded from the example to DataMesh FactVerse
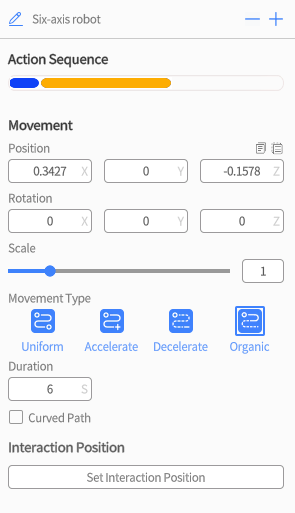
Model sub-level selection
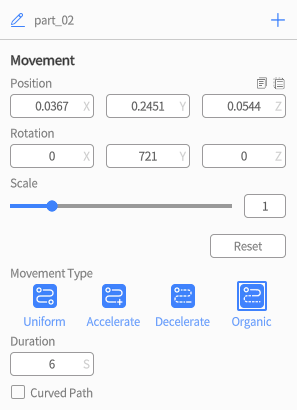
Add movement action
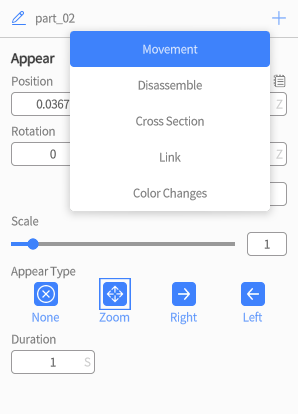
Setting the duration of the model's action
Select the model's sub-level "part_03", rotate about 40 degrees along the z-axis, then select the sub-level "part_04", and rotate it along the z-axis by a certain angle.
Click the Preview button in the upper right corner to play the model action just set and observe whether the duration of the action is appropriate.